利用SSR修正的RTKLIB PPP测试 |
您所在的位置:网站首页 › ssr 解析 › 利用SSR修正的RTKLIB PPP测试 |
利用SSR修正的RTKLIB PPP测试
|
文章目录
一、前言二、PPP-RTK概念三、SSR修正概念四、RTKLIB中SSR修正相关代码五、SSR修正的RTKLIB PPP测试参考文献
欢迎关注个人公众号:导航员学习札记
一、前言
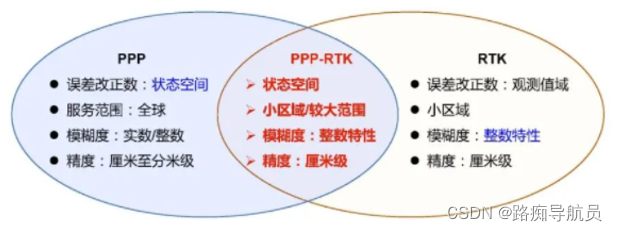
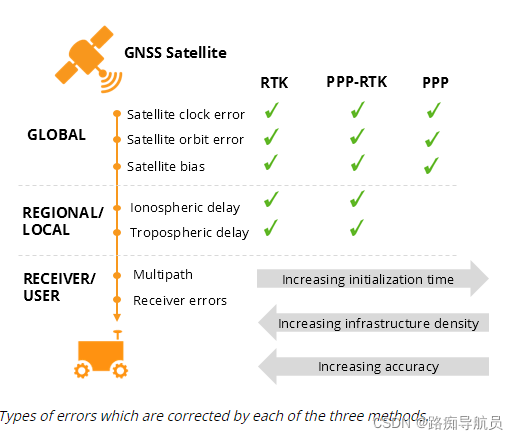
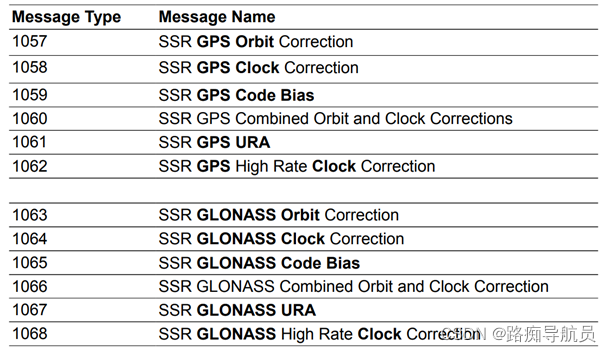
第一次看到PPP-RTK这个名词,还挺疑惑和好奇的。这几天工作之余,整理了一下PPP-RTK、PPP、RTK的区别,把RTKLIB中PPP-RTK(即SSR修正)相关的代码也都看了一下,感觉还是比较简单的。另外也用实际数据测试了一下RTKLIB PPP使用SSR修正的效果,如果你感兴趣的话,就请继续看下去吧! 如果有小伙伴们知道组合导航、测绘方向的宝藏博主或者公众号,希望可以留言推给我,让我共同学习! 二、PPP-RTK概念PPP-RTK实质是利用CORS网,生成卫星轨道、卫星钟差、卫星伪距偏差、卫星相位偏差、电离层延迟、对流程延迟等改正数,通过卫星向地面播发,从而加快PPP收敛速度的定位技术。 武汉大学张小红教授2021年5月的报告《PPP-RTK技术面临的机遇和挑战》中,下面两张图比较清晰的展现了PPP、RTK、PPP-RTK的不同之处,以及优劣势。 如果在PPP中能得到所有的修正,其实和RTK也就差不多了,因为RTK本质上也是和基站双差后消除各种误差,使得模糊度具有整周特性。下图比较好的展示了在RTK、PPP-RTK、PPP中分别消除了哪些误差。 SSR(State Space Representation,状态空间域)修正其实就是一种修正方式,将观测值误差分解为卫星轨道、卫星钟差、卫星伪距偏差、卫星相位偏差、电离层延迟、对流程延迟等“状态量误差”;与之相对是RTK中的OSR(Observation Space Representation,观测值域),基站直接提供融合了各种修正的观测值。 根据参考[3],RTCM标准委员会把SSR修正数据开发分成三个阶段: 第一阶段:包括卫星轨道、卫星时钟、伪距偏差修正数,以及URA第二阶段:包括天顶TEC电离层修正,卫星相位偏差修正第三阶段:包括电离层倾斜修正,对流程修正SSR修正数据的修正方法在参考[3]或者其他文献中很容易就可以找到,这里不再赘述。第一阶段的RCTM SSR修正信息如下: RTKLIB目前主要支持第一阶段的SSR修正,即卫星轨道、卫星时钟、伪距偏差修正(也在试验性支持第二阶段中的相位偏差修正)。与SSR修正相关的源码主要包括一下几个部分: readpreceph函数:位于postpos.c中,设置RTCM文件,以及初始化rtcm结构体,核心代码如下: /* set rtcm file and initialize rtcm struct */ rtcm_file[0]=rtcm_path[0]='\0'; fp_rtcm=NULL; for (i=0;i strcpy(rtcm_file,infile[i]); init_rtcm(&rtcm); break; } } update_rtcm_ssr函数:位于postpos.c中,每读取一个历元数据,检查是否需要进行SSR数据的更新,核心代码如下: /* read rtcm file until current time */ while (timediff(rtcm.time,time) if (!rtcm.ssr[i].update|| rtcm.ssr[i].iod[0]!=rtcm.ssr[i].iod[1]|| timediff(time,rtcm.ssr[i].t0[0]) code=obs[i].code[j]; if ((freq=sat2freq(obs[i].sat,code,nav))==0.0) continue; /* correct phase bias (cyc) */ obs[i].L[j]-=nav->ssr[obs[i].sat-1].pbias[code-1]*freq/CLIGHT; } } corr_meas函数:位于ppp.c中,进行伪距偏差修正,核心代码如下: if (opt->sateph==EPHOPT_SSRAPC||opt->sateph==EPHOPT_SSRCOM) { /* select SSR code correction based on code */ if (sys==SYS_GPS) ix=(i==0?CODE_L1W-1:CODE_L2W-1); else if (sys==SYS_GLO) ix=(i==0?CODE_L1P-1:CODE_L2P-1); else if (sys==SYS_GAL) ix=(i==0?CODE_L1X-1:CODE_L7X-1); /* apply SSR correction */ P[i]+=(nav->ssr[obs->sat-1].cbias[obs->code[i]-1]-nav->ssr[obs->sat-1].cbias[ix]); } satpos_ssr函数:位于ephemeris.c中,利用星历文件和SSR修正数据进行卫星位置计算,核心代码如下: /* ssr orbit and clock correction (ref [4]) */ if (fabs(t1)>MAXAGESSR||fabs(t2)>MAXAGESSR) { trace(2,"age of ssr error: %s sat=%2d t=%.0f %.0f\n",time_str(time,0), sat,t1,t2); *svh=-1; return 0; } if (ssr->udi[0]>=1.0) t1-=ssr->udi[0]/2.0; if (ssr->udi[1]>=1.0) t2-=ssr->udi[1]/2.0; for (i=0;ideph[i]+ssr->ddeph[i]*t1; dclk=ssr->dclk[0]+ssr->dclk[1]*t2+ssr->dclk[2]*t2*t2; /* ssr highrate clock correction (ref [4]) */ if (ssr->iod[0]==ssr->iod[2]&&ssr->t0[2].time&&fabs(t3) trace(3,"invalid ssr correction: %s deph=%.1f dclk=%.1f\n", time_str(time,0),norm(deph,3),dclk); *svh=-1; return 0; } /* satellite postion and clock by broadcast ephemeris */ if (!ephpos(time,teph,sat,nav,ssr->iode,rs,dts,var,svh)) return 0; /* satellite clock for gps, galileo and qzss */ sys=satsys(sat,NULL); if (sys==SYS_GPS||sys==SYS_GAL||sys==SYS_QZS||sys==SYS_CMP) { if (!(eph=seleph(teph,sat,ssr->iode,nav))) return 0; /* satellite clock by clock parameters */ tk=timediff(time,eph->toc); dts[0]=eph->f0+eph->f1*tk+eph->f2*tk*tk; dts[1]=eph->f1+2.0*eph->f2*tk; /* relativity correction */ dts[0]-=2.0*dot(rs,rs+3,3)/CLIGHT/CLIGHT; } /* radial-along-cross directions in ecef */ if (!normv3(rs+3,ea)) return 0; cross3(rs,rs+3,rc); if (!normv3(rc,ec)) { *svh=-1; return 0; } cross3(ea,ec,er); /* satellite antenna offset correction */ if (opt) { satantoff(time,rs,sat,nav,dant); } for (i=0;i |

【本文地址】
今日新闻 |
推荐新闻 |